














《鄉民大學問EP.35》字幕版|韓國瑜被針對?!賴清德找卓榮泰掌政院 黃暐瀚:論功行賞?!為陳其邁鋪路?馬見習提九二共識 柯文哲:恐違主流民意?黃子佼事件登BBC 高嘉瑜表態 女大生嗆:閹割執法!
NOW影音
更多NOW影音









焦點
更多焦點-

辦公室主任罵官員挨批 涂權吉回應了:已對言行用詞不當教育
立法院會衛環委員會昨天進行專報,國民黨立委涂權吉提案,要求衛福部長薛瑞元撰寫檢討報告,衛福部官員在休息之際欲找涂權吉說明,辦公室主任卻開罵「任何臨時提案都先通過我」,高分貝讓在場主席、立委、官員與議事
2024-04-16 18:59
-

郭智輝接掌經濟部!首位「民營企業董事長」入閣 歷任經長資歷曝
賴清德內閣人事近日陸續曝光,今(16)日宣布將由崇越集團董事長郭智輝接任經濟部長,跌破外界眼鏡,而他更是歷任33名經濟部長中,首位未任過官職,就直接從產業界入閣的企業集團董事長,也正因如此,引來兩極化
2024-04-16 22:40
-

比汪小菲更甜!大S與具俊曄電梯玩自拍 「花式擁抱」羨煞旁人
大S(徐熙媛)和韓國歐巴具俊曄放閃不手軟,睽違20年的舊愛重逢,再婚2年依舊是蜜月期,具俊曄最近上韓國節目《脫掉鞋子恢單4Men》受訪,坦言兩人感情好到不行,每次外出時都會在電梯擁抱自拍,留下兩人甜蜜
2024-04-16 19:10
-

涉500萬助郭台銘連署!屏東縣議長周典論開庭喊冤稱「心臟不適」
(中央社記者李卉婷屏東縣16日電)國民黨屏東縣議長周典論涉以500萬元助郭台銘總統連署案,今天在屏東地院進行首次準備程序庭,周典論喊冤,過程中因心臟不舒服一度暫停,律師則盼視身體狀況予以交保。周典論為
2024-04-16 22:01
-

直播/戰貓來了!蕭美琴現身政大校園 與大學生暢談青年議題 由政大學⽣會、學⽣議會主辦,並與《 NOWnews 今⽇新聞》共同合辦之「政治進 ⼊⼤學 2.0?!-青年與副總統候選⼈」講座,今晚在政大登場,今晚七點,民進黨副總統候選人蕭美琴將現身政大,與青年學⼦
MORE -

又要缺水了?石門水庫「蓄水剩一半」 全台還有5水庫剩不到6成 自去年8月,南部水情好轉、全台用水穩定開始,許久未聞有哪個地區有缺水情事。不過近期石門水庫因正值枯水期,加上1期稻作用水量大,水位持續下降,如今蓄水率約只剩下一半,引發缺水憂慮再起。為此,中央與地方政
MORE -

下月9日就是蘇聯二戰勝利日!烏克蘭指揮官:俄軍恐佔領烏東要塞 5月9日是俄羅斯紀念前蘇聯時期、戰勝納粹德國的「勝利日」,對俄國來說意義非凡,烏克蘭最高指揮官14日坦言,俄軍恐在那之前,佔領烏東要塞恰西夫亞爾(Chasiv Yar),為爭奪東部高地控制權奠定基礎。
MORE -

再生能源怎推廣?網友提案「放寬綠電憑證」 民進黨政府上台後,力推再生能源,經濟部在2016年提出,目標2025年能源佔比為燃氣5成、燃煤3成、再生能源2成;但今年年初,經濟部悄悄將再生能源佔比目標下修為15.2%。經濟部雖解釋是因近兩年經濟高
MORE -
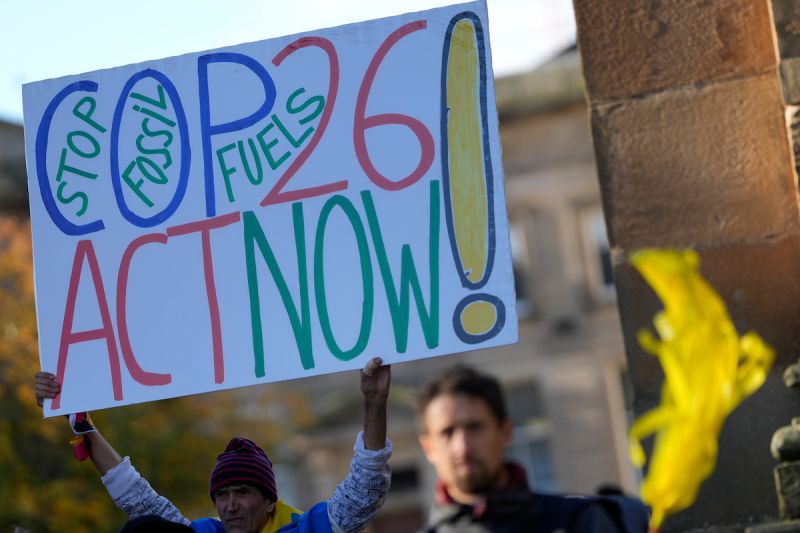
備戰碳交易7/氣候變遷末日倒數 各國力拚2050淨零碳排 世界各國如今面臨全球性的氣候變遷危機,總統蔡英文去年也宣示台灣將和國際主流同步,達到「2050淨零排放」目標;事實上,在去年第26屆聯合國氣候變遷大會(COP26)當中,多國共同簽署了《格拉斯哥氣候協
MORE -

FEniX被問同時愛上一個女孩該搶還是退?5人答案很優秀 來勢洶洶!全方位人氣男團FEniX五位成員夏浦洋、陳峻廷、曹家齊、MAX(徐彭臒)與李承隆,自推出首張同名正規專輯後,一路以來深受「救火隊(官粉名)」強大支持,加上新歌曲曲動聽,因此讓FEniX專輯口
MORE -

新北平溪天燈節下月17日登場 七大亮點迎觀光龍景好運年 將邁入第26年舉辦的「新北市平溪天燈節」,今(16)日舉辦活動起跑記者會,新北市副市長陳純敬及參與宣傳短片拍攝與活動表演的職棒中信兄弟啦啦隊「PS女孩」成員短今等活動團隊出席宣傳,活動除了將於2月17
MORE -
A漫異想世界 MORE -

日本成人片未來「動作只能演」 女優計畫毀了活不下去 日本AV產業大改革,「AV演出被害防止・救濟法案」參議院通過後,許多AV女優哀號沒了工作,各個拍攝合約與日程不斷延期,連男優都閒到跑去抓蟲,沒了收入十分淒慘。不少AV女優因為AV新法影響工作,金苗希實
MORE -

要求公布加熱菸審查資料遭拒 賴香伶怒:要掀開「黑箱衛福布」 衛福部國健署已召開完9月中第一次的加熱菸健康風險評估審查會議,立委賴香伶指出,她於9/17再次發函,要求衛福部國健署提供專家學者名單、議審查標準、資料及發言過程直播影片,卻遭衛福部拒絕。賴香伶表示,希
MORE -

竊占國土7/國產署坦言人力不足 每年追討進度不如預期 非法砂石業者占用國土問題相當嚴重,全台灣各縣市都有此現象。根據財政部國有財產署在2020年的統計資料,我國的國有土地總面積約223萬7268公頃,「非公用國有土地」約21萬9543公頃,被侵佔達2萬3
MORE -

今年首見「侵襲性b型嗜血桿菌」確診案!8旬婦感染 易誤認成感冒 衛福部疾病管制署今(2)日公布國內本(2024)年首例「侵襲性b型嗜血桿菌感染症」確定病例,為南部80多歲女性,為機構住民,3月20日出現發燒、畏寒及呼吸喘等症狀送至醫院就醫,因疑似敗血症收治住院並由
MORE -
被偷走的那疫年 MORE -

大法官提名權總統一手抓 民團籲修憲禮讓副總統與在野黨 4位現任大法官即將任期屆滿,依慣例總統府召集審薦小組,並於昨日召開第一次會議,但檢視大法官名單,民團與在野黨質疑15位大法官均由蔡英文總統提命後任命,恐有違憲與無法維持三權分立疑慮,呼籲修憲恢復任期交
MORE -

影/獨家創舉挑戰不可能 日環食節目全紀錄 於6月21日下午,天文奇景「日環食」登場亮相。《NOWnews今日新聞》獨家透過航機空拍,以空拍鏡頭,帶給觀眾不同角度,一覽日環食的奇蹟美景。▲NOWnews獨家空拍日環食,空中拍攝到日環需在事前透過
MORE -

足球/梅西今夏恐將離隊 ESPN:PSG希望他能降薪3.31億 梅西(Lionel Messi)和法甲聯賽巴黎聖日耳曼(PSG)球迷之間的關係惡化,這可能也將影響到他未來的續約意向,根據法國媒體《RMC Sport》記者Fabrice Hawkins報導,除非情況
MORE -

拳擊女王陳念琴分享戰勝淋巴癌歷程 邊吐邊練也不曾放棄 在東京奧運挺進8強的「拳擊女王」陳念琴,在賽場的英姿,台灣民眾歷歷在目,但很多人都不知道,其實他在挑戰奧運賽場前,才面臨了病痛的磨難,距離原訂的奧運比賽時間只剩下半年,她卻意外查出罹患了淋巴癌,突如其
MORE -

九合一大選確診者不得投票!60508人權益受損 監院促請2機關檢討 去(2022)年九合一選舉,依中央選舉委員會、中央防疫指揮中心考量疫情及選務人力,決議COVID-19非重症確診者不得外出投票,引發剝奪人民投票權爭議,監察院也立案展開調查,並於今年7月18日,通過監
MORE -

中華職棒/還不是靠恰恰!彭政閔清壘打兄弟下半季封王 中信兄弟今天在台中洲際棒場出戰富邦悍將,只要避免落敗就可以拿下下半季冠軍,結果兄弟不只贏球,還靠精神領袖「恰恰」彭政閔敲出清壘二壘安打,一棒終結比賽,終場兄弟以8:3贏球,也順利拋下黃色彩帶。前天才剛
MORE -

特搜英雄任務完成!搜救犬Roger喜收陳其邁玩具 下秒先啃爛超萌 花蓮日前發生強震,釀多人死傷,高雄市也派出特搜救災,市長陳其邁昨(7)日也感謝特搜英雄平安歸來,並代表市民,向特搜隊同仁深深一鞠躬表達感謝;他也特別提到Roger、傳八等搜救犬,並送上玩具、小零食慰勞
MORE
要聞
更多要聞-
辦公室主任罵官員挨批 涂權吉回應了:已對言行用詞不當教育
立法院會衛環委員會昨天進行專報,國民黨立委涂權吉提案,要求衛福部長薛瑞元撰寫檢討報告,衛福部官員在休息之際欲找涂權吉說明,辦公室主任卻開罵「任何臨時提案都先通過我」,高分貝讓在場主席、立委、官員與議事
2024-04-16 18:59
-

吳宗憲譴責案自投反對!沈伯洋批「笑死人」 本尊嗆:要多唸書
立法院15日召開司法及法制委員會,針對藍白提出國會改革相關法案進行逐條審查,過程中民進黨逐條有異議卻直接送保留,引發民進黨不滿,為此提出對召委吳宗憲的譴責案,最後6比6戰成平手,吳宗憲以主席身份自投反
2024-04-16 17:53
-

巷仔內/楊寶楨合作基隆市政府!反罷免、爭曝光互蒙其利
民眾黨前發言人、立院黨團副主任楊寶楨2月落淚請辭黨內雙職務。基隆市政府今日舉行記者會,宣布楊寶楨5月中旬起將擔任「2024基隆政策推廣大使」。對於面臨罷免危機的基隆市長謝國樑、尋找政治舞台的楊寶楨,都
2024-04-16 17:20
-

批蔡英文搶先曝國安人士「2個不尊重」 黃揚明:賴清德皮繃緊了
準總統賴清德內閣人事尚未完全公布,總統蔡英文今(16)日上午接見外賓時,卻先宣布總統府秘書長林佳龍將接任外交部長,而外交部長吳釗燮將轉任國安會秘書長。對此,資深媒體人黃揚明認為,這事件凸顯蔡英文的2大
2024-04-16 17:08
新奇
更多新奇-

俄國妹領所有存款來台灣!向台籍男友求婚 霸氣喊「沒錢我養你」
為了追尋真愛勇氣十足!一位俄羅斯女孩Mila,透過交友軟體認識台灣男子,雙方迅速墜入愛河,後續Mila更直接帶了所有存款飛來台灣,還主動求婚,甚至霸氣喊「沒錢我養你」,主動追愛的過程曝光,也讓大批觀眾
2024-04-16 17:01
-

陸網紅Sean爆「兒子被台灣拒絕入境」!真相大反轉 台人失望退追
中國知名網紅「Sean」肖恩與好友「陳老師」去年數度來台旅遊,拍攝許多Vlog遊記,更因為談吐風趣而爆紅,但近期卻出現掉粉危機!4月11日時,Sean在個人頻道上發出影片,聲稱「兒子被台灣拒絕入境」,
2024-04-16 14:01
-

竊賊爽中1.6億樂透!苦主「信用卡遭盜刷」想分獎金 結局揭曉了
天上掉下驚喜橫財卻只能用看的!日前在英國有兩名竊賊,盜用他人信用卡拿去購買樂透彩券,卻意外贏得400萬英鎊(約新台幣1.6億元)大獎,後續遭警方查明真相後逮捕,並傳喚被盜刷的苦主嘉書亞(Joshua
2024-04-15 20:20
-

電線杆貼滿廣告紙!他撕毀遭警察制止「這樣是毀損罪」 真相反轉
台灣街頭巷尾能看到許多電線杆、變電箱,上頭常常會有許多白白的殘膠,因為常會有各種業者張貼小廣告,清除後又再度出現,造成市容髒亂,也讓相關單位煩惱不已。近期銀行家「尼莫」就目睹小廣告張貼的瞬間,並感慨「
2024-04-14 16:14
娛樂
更多娛樂-

直擊/捕獲野生孫藝真!現蹤台北101嗨嗑小籠包 1表情仙暈粉絲
南韓女星孫藝真今(16)日旋風來台,出席美妝品牌代言活動,也是她出道至今25年首度降臨台灣,令許多粉絲超級興奮。晚間,孫藝真終於結束她的101大樓行程,還吃到了心心念念的鼎泰豐小籠包,在保鑣的護送下心
2024-04-16 21:30
-

賴薇如做試管子宮外孕!痛苦喊「腹部劇痛出血」 救治過程曝光
前女子團體《七朵花》成員賴薇如腹部劇痛出血,昨(15)日突然到醫院掛急診,讓粉絲相當震驚。賴薇如與老公邱樂偉愛情長跑6年,今年1月宣布結婚,婚後兩人一直想生小孩,植入胚胎希望懷上龍寶寶,沒料到居然發生
2024-04-16 20:44
-

小賈斯汀慘變「獨臂流浪漢」!滿臉鬍渣現蹤音樂節 粉絲認不出來
加拿大流行歌手小賈斯汀(Justin Bieber)憑藉天籟歌聲與帥氣的外型,吸引大批歌迷支持,儘管隨著年齡漸增,個性、外型逐漸黑化,經常發生負面新聞,但人氣依舊不減。近日,就有網友發現小賈斯汀的風格
2024-04-16 20:39
-

金鐘女星曾激吻許光漢!自爆《全明星》鮮肉「頻繁進出」愛巢
《鬼天廈》導演謝志文,今(16)日率領眾演員黃瀞怡(小薰)、陳妤、潘君侖、戴平雅(白癡公主)、鄭茵聲、高慧君、游書庭出席首映會。陳妤曾與男神許光漢在《戀愛沙塵暴》中激吻、獲金鐘新進演員獎,這回與潘君侖
2024-04-16 20:21
運動
更多運動-

張育成要打復健賽了!經過6週治療 高喊:用最快速度回球場
坦帕灣光芒隊台灣好手張育成,今(16)日晚間透過社群媒體宣布,自己經過6週時間積極治療,復健,已經要開始打復健賽,他表示:「接下來我一樣會拼勁全力,一步一步來,用最快的速度回到球場。」張育成是在春訓受
2024-04-16 21:56
-

NBA附加賽/勇士護框表現不佳 菜鳥中鋒TJD成為「弒君」關鍵角色
金州勇士將在明(17)日對決沙加緬度國王,雙方將力拚爭取西區第8種子的門票,勇士本季限制對手在籃下的命中率做得不理想,國王中鋒Domantas Sabonis將能對他們造成很大的威脅。從近期教練團的排
2024-04-16 21:41
-

李亦伸專欄/NBA季後賽將開打!東區第二種子尼克 會幹什麼大事
紐約尼克例行賽最後一戰經延長賽120:119力克公牛,50勝32敗戰績擠下公鹿,尼克搶下東區第二種子。對尼克這是一場可贏可不贏的比賽,沒那麼重要,尼克輸球,可能東區第三種子,季後賽第一輪打溜馬。結果尼
2024-04-16 19:37
-

NBA附加賽/勇士何以淪落如此地位?Kerr:季初嘴綠和K湯心態不對
金州勇士本賽季屢次深陷險境,如今他們以46勝36敗的戰績進入附加賽,必須連拿2勝才能取得季後賽門票。今年開季一度只有19勝24敗的糟糕表現,是讓勇士掉入泥沼的重要原因。談到那一個時期,勇士主帥Stev
2024-04-16 18:31
財經生活
更多財經生活-

快訊/大樂透連三期開頭獎!4/16幸運兒獨得1億 獎落「這縣市」
大樂透連三期開出頭獎!繼4月9日開出新竹縣關西鎮開出頭獎為1.8億、4月12日新北市林口區開出頭獎1億之後,今(16)日大樂透第113000043期頭獎1億元再度送出,獎落臺北市,由萬華區康定路265
2024-04-16 22:16
-

花蓮強震善款還沒停!寶可夢公司、光榮特庫摩「各捐1千萬日圓」
台灣在4月3日受到芮氏規模7.2的強震侵襲,位於震央最近的花蓮,出現許多嚴重受創災情。在世界各國中,又以日本的捐款行動最為熱烈,許多民眾都表示想還台灣過去東日本大地震時的恩情。昨(15)日日本寶可夢公
2024-04-16 21:37
-

快訊/大樂透頭獎1億元!「4/16完整獎號」揭曉 中了就環遊世界
大樂透第113000043期今(16)日晚間開獎,本期頭獎保證1億元,就在剛剛完整獎號皆已開出,快拿起手邊彩券對看看財神是否降臨,拿到1億獎金去環遊世界!4/16大樂透中獎號碼(第113000044期
2024-04-16 20:48
-

世界地球日優惠!全家拿鐵5折、燕麥拿鐵特價 這家120杯免費咖啡
全家響應4/22世界地球日,於4月19日起至22日,搶泰式厚椰拿鐵、燕麥奶拿鐵限量優惠券外,年底前免費租借全家循環杯,可享特濃拿鐵、抹茶拿鐵半價優惠,即日起於「全家行動購」購買歐萊德零碳髮品,可享69
2024-04-16 18:14
全球
更多全球-

還沒正式退出政壇!李顯龍交棒新加坡總理 轉任國務資政
新加坡總理李顯龍(Lee Hsien Loong)日前宣布將交棒給現任副總理兼財務部長黃循財(Lawrence Wong),消息一出新加坡將告別「李家天下」更一時蔚為討論。不過根據新加坡媒體報導,下一
2024-04-16 22:29
-

特斯拉宣布全球裁員10%!馬斯克放話:每5年就需重組和精簡
中國電動車強勢傾銷下,全球電動車競爭激烈,特斯拉日前宣布將在全球範圍內裁員10%,相當於裁減約1.4萬名員工,特斯拉執行長馬斯克(Elon Musk) 承認這是因應中國企業加入該產業帶來的衝擊,但也表
2024-04-16 20:11
-

丹麥首都「400年歷史建築」陷火海 市民紛紛衝入大樓搶救畫作
位於丹麥首都哥本哈根市區的一座17世紀歷史建築發生火災,這座建築是丹麥首都最古老、最著名的建築之一,曾作為丹麥的證券交易所已有約400年的歷史。根據當地媒體報導,大火發生時除了館內工作人員外,就連街上
2024-04-16 19:57
-

史上最嚴重!全球珊瑚礁大規模白化 專家憂:海洋動物恐無家可歸
由於破紀錄的海洋高溫,全球的珊瑚正在白化與死亡。美國國家海洋和大氣管理局(NOAA)表示,全球正發生第4次大規模珊瑚白化現象,且這次規模比之前都要大,讓專家十分憂心。根據《BBC》報導,珊瑚對地球至關
2024-04-16 19:09









